

 Bonjour à toutes et tous,
Bonjour à toutes et tous,
Je dépose ici un petit article que je n’ai mis que trop longtemps à finaliser, alors que son idée de départ remonte déjà à plusieurs années. Les trois quarts des messages privés traitant d’échosondeur qui m’arrivent sont les mêmes: comment bien choisir son échosondeur pour pêcher le silure à vue sous la sonde.
Je profite donc du super site de l’esoxiste.com pour poster ce qui aujourd’hui, en Août 2016, est ma réponse personnelle à la question posée ci-dessus.
L’évolution rapide et la multiplication des offres dans le commerce en matière de sondeur et combinés de pêche ces dernières années ne facilitent pas le choix du néophyte. Et quand on connaît l’investissement financier que représente l’acquisition de cet outil, l’erreur de choix s’avère vite amère.
L’apparition d’options et de fonctions aux noms anglophones pimpants et aux rendus rutilants lorsqu’ils sont partagés par des pêcheurs aguerris partenaires des principaux fabricants (dont je fais parti à l’heure où j’écris ces lignes, pour que tout soit transparent) a tendance à parfois engendrer une espèce de « course à l’armement » en terme de capacité de l’électronique embarqué. Ce phénomène peut alors faire perdre de vue l’objectif premier qui nous concerne ici : l’aide à l’action de pêche.
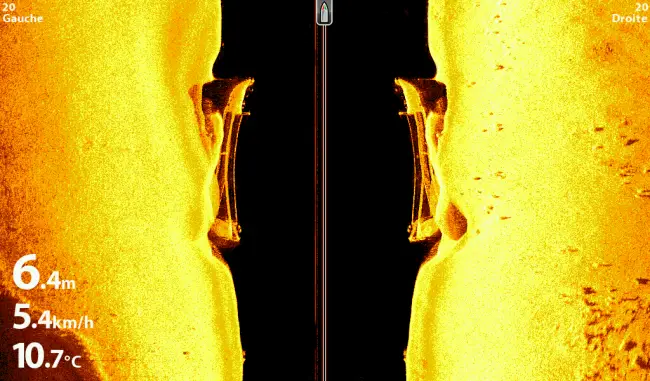
Figure 1: Une barge coulée par 6m50 de fond dans la Saône en vue Side Imaging (Helix 10). Une image superbe où l’on distingue jusqu’aux bittes d’amarrages sur la poupe et la proue. Est-elle pour autant primordiale pour mon action de pêche?
Dans cet web-article, qui sera long, pédant et fastidieux (au moins je préviens :-)), les objectifs principaux sont de:
- présenter les fonctions principales des échosondeurs/combinés des plus simples au plus élaborés, dans ce qui est l’ordre de prépondérance à mes yeux pour la pêche du silure à vue sous la sonde
- mettre en relation ces fonctions et leurs paramètres variables avec des exemples d’illustration tirés de situations théoriques et de terrain.
A noter que :
- l’ordre de priorité des fonctions à choisir n’engage que mon avis, et ne prévaut ici qu’uniquement pour la pêche du silure à vue sur l’échosondeur.
- les modèles, exemples, et noms des combinés échosondeurs présentés dans cet article sont de marque Humminbird (Navicom), car ce sont les produits que j’estime connaître suffisamment pour pouvoir en parler. Cependant, sachez bien entendu qu’il existe des plus ou moins équivalences chez l’ensemble des fabricants (dont je suis moins capable de vous parler, mais dont d’autres pêcheurs le feront avec talent).
AVANT TOUTE CHOSE :
Avant de nous plonger dans le vif du sujet, lorsque vous demandez conseil pour une machine, ou que vous souhaitez en acquérir une, pensez à votre CAHIER DES CHARGES personnel fonctionnel :
==> POURQUOI est ce que je veux un échosondeur ? (Pêcher le silure ? le Carna ? La carpe ? En verticale ? Au posé ? Avec quelles priorités et régularité ? …)
==> A QUOI ma machine va-t-elle me servir, et avec quelles priorités ? (Pêcher à vu ? cartographier ? Repérer mes spots ? trouver des structures ? sonder des très grands fonds ? installé sur un bateau de pêche ? une barque ? un float ? …)
==> QU’est ce que j’attends de ma future machine ? (Simplicité avant tout ? + complexe et + détaillée ? Tactile ou non ? Fixe ou mobile ? Visible du poste de pilotage ? du pont avant ? de partout sur le bateau ?) .
Cette petite gymnastique à mon sens permet d’éviter bien des déceptions post achat.
Radotons encore une fois mais dans le cas du présent article, nous traitons bien du choix d’un échosondeur pour pêcher le silure à vue à soutenir ou en verticale, dans des eaux de 3 à 20 mètres de profondeur.
PARTIE I : la fonction 2D, bien choisir ses paramètres de LA fonction primordiale.
C’est la fonction que vous utiliserez quoiqu’il en soit en permanence lors de vos actions de pêche du silure à vue ! Autant dire que si il y a un paramètre sur lequel il ne faut pas se tromper, c’est bien celui-ci. Et pourtant, cédant à la tentation de fonction peut-être plus sexy sur le papier comme le Down Imaging (cf PARTIE IV), de nombreux nouveaux acquéreurs d’échosondeur se trouvent déçus suite à un mauvais choix de paramètres de la fonction 2D lors de leur achat.
IA] Le bon choix
Dans notre cas, la fonction 2D idéale doit offrir 2 cônes de détection, l’un étroit (d’environ 20°), l’autre plus large (60°). Dans les paramètres du constructeur, vous trouverez ce critère sous l’appellation « Dual Beam, 80/200kHz ». 80kHz étant la fréquence des ondes formant le cône de 60°, et 200kHz celle du cône étroit de 20°.
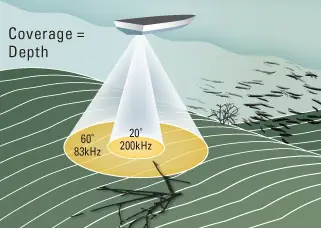
Figure 2: de source Navicom. Illustration des 2 cônes de détection offerts par une sonde dual beam 20°/60°
IB] Comprendre ce choix.
IB-1) Détection de poissons :
Plus le cône de détection est large, et plus la largeur du champ de détection est importante (nous « voyons » arriver les silures de plus loin). En contre partie, plus le cône de détection est large, et plus la résolution spatiale de la détection (structures, séparation des cibles) est faible. C’est bien entendu l’inverse sur un cône étroit. La double fréquence permet donc de cumuler ces 2 avantages : bonne résolution des structures et du substrat grâce au cône étroit, et grand champ de détection grâce au cône large (Cf figure 3).
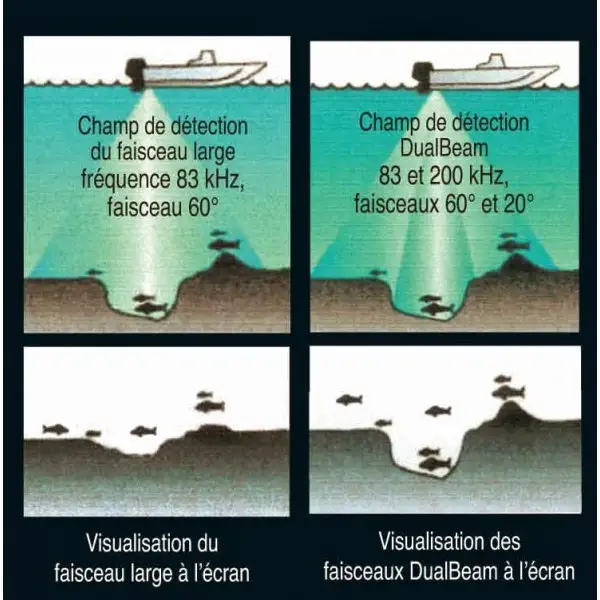
Figure 3: de source Navicom. Comparaison théorique illustrée du résultat de la vue sondeur avec une sonde à simple faisceau 60° (colonne de gauche), et une sonde à double faisceaux 20°/60° (colonne de droite). Dans la colonne de gauche, avec le faisceau simple 60°, la largeur de prospection est satisfaisante mais la définition du substrat et le rendu de la fosse est moyen. Dans la colonne de droite, avec une sonde 20°/60°, le cône de 60° continue d’apporter une largeur de prospection satisfaisante, mais en plus, le cône de 20° permet quant à lui d’apporter sa bonne résolution spatiale sur le substrat présent sous le bateau. La fosse apparaît maintenant clairement. Remarque supplémentaire, un silure plaqué dans la fosse n’apparaitra pas sur le sondeur dans la colonne de gauche, il sera complètement noyé dans la zone d’ombre. Si vous ne pratiquez pas une pêche à gratter dans ce cas, vous loupez le spot et le silure potentiel. Dans la colonne de droite, une boursoufflure caractéristique trahira sa présence. Vous pourrez alors adapter vos actions de pêche en conséquence.
Concrètement, en terme d’action de pêche, ce système de double fréquence permet à la fois de (i) sonder large, et donc de détecter les silures qui gravitent autour du bateau avant qu’ils n’arrivent vers votre montage à l’aplomb du bateau. Cela dans le but d’anticiper leur arrivée et de présenter vos appâts toujours au dessus de leur tête. Mais également (ii) de sonder étroit et précis, (cône 20°) pour (a) bien comprendre les évolutions de structure du fond de l’eau et (b) ajuster au mieux vos actions en fonction des comportements du poisson qui fait face à votre montage.
De plus, les déplacements d’un écho dans les cônes du sondeur sont interprétables grâce à l’épaisseur du trait mais surtout grâce à la couleur du retour. Avec un paramétrage classique de la machine, plus l’écho est proche du rouge, plus le poisson est proche du cœur de sonde, et donc de votre montage.
Ainsi, un écho de silure qui progressivement passe du vert au rouge, est un écho qui s’approche de votre montage (cf figure 4). L’action de pêche semble lui convenir, on se prépare à la touche.
Si l’écho, toute chose étant égale par ailleurs, passe du rouge au vert, alors ce poisson est en train de s’éloigner. Il faut tenter quelque chose en terme d’action de pêche pour espérer lui faire faire demi tour (animations, clonk, etc…).
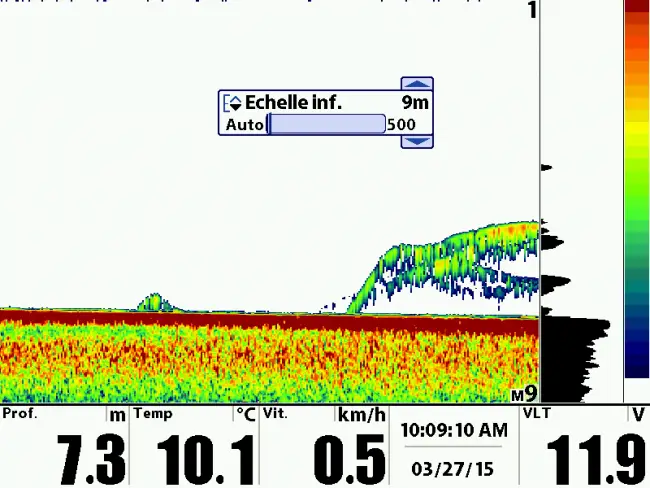
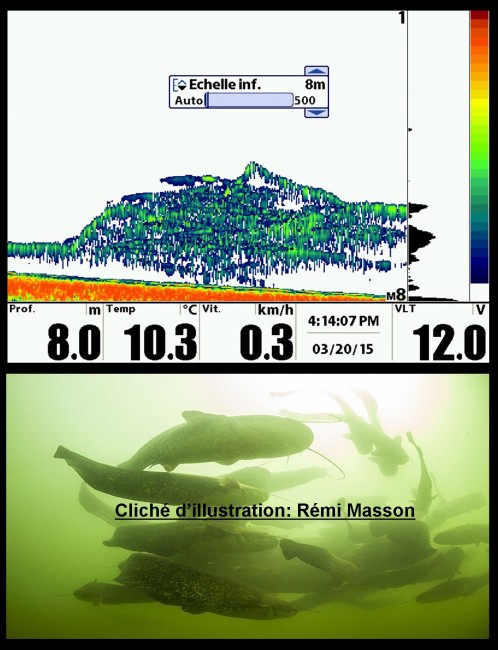
Figure 4: Capture d’écran 2D réalisée lors d’une prospection suite à un coup de clonk (modèle FF1199). Le silure le plus haut passe du vert au rouge. Il se rapproche de l’origine du son, le coup de clonk, émis à l’aplomb de la sonde, donc au milieu des cônes de détection. Conclusion: l’action de clonk semble donc convenir à ces silures sur ce parcours.
IB-2) Détection du ou des montages
Lors de la journée parfaite, votre montage se trouve et se déplace au milieu des cônes. Sa détection est parfaite. La dérive naturelle est à 0.8 km/h, le parcours est partout au minimum de 8 mètres d’eau, pas de vent, « on se voit bien à l’écho »et en plus les gros poissons mordent sans rechigner…. En rentrant de ces journées là, on est prêt à se prendre pour JCT. Oui mais voilà, ces journées sont…. rarissimes (en tout cas pour moi).
Vent et courant principalement vont venir impacter la présentation idéale du montage. Et que dire de la détection de votre éventuel équipier placé généralement à votre gauche. Pour que ce type de pêche à vue soit efficace et agréable, il reste primordial de bénéficier d’un bon retour d’écho de son montage sur son écran. Pour cela, plus le cône est large, et donc plus la surface de détection autour du bateau est élevée, et plus vous retrouverez facilement la trace de votre montage sur votre écran. Que ce soit pour le pêcheur bien à l’aplomb de la sonde, que pour l’équipier.
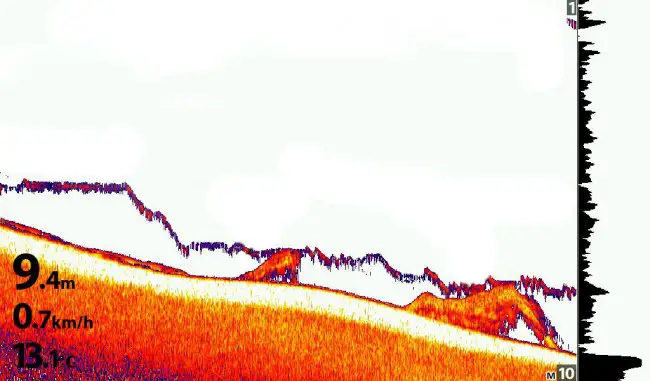 Figure 5: Source Pêcheur de Sardine. Capture 2D réalisée en action de pêche (Helix9). L’objectif de la pêche à vue reste de voir son montage sur l’écho (le trait violet rouge continue) afin de voir et pêcher les silures en direct sur l’échosondeur (les 2 traits qui se lèvent du fond et viennent voir le montage).
Figure 5: Source Pêcheur de Sardine. Capture 2D réalisée en action de pêche (Helix9). L’objectif de la pêche à vue reste de voir son montage sur l’écho (le trait violet rouge continue) afin de voir et pêcher les silures en direct sur l’échosondeur (les 2 traits qui se lèvent du fond et viennent voir le montage).
Chez NAVICOM, nous retrouvons 2 combinaisons de doubles fréquences : la 20/60° et la 16/28°. (Cette dernière 16/28° équipe les versions de combinés dites DOWN IMAGING.)
Mais concrètement, en terme de diamètre de champs de détection en mètre, ces angles de cône de sonde, ça veut dire quoi ?
C’est en fait très simple. Le cône de détection forme entre la sonde et le fond de l’eau un triangle isocèle constitué de deux triangles rectangles avec un grand côté adjacent commun (si si, vous êtes tous un jour allé au collège ! 😀 ; cf figure 6).
==> La valeur de l’angle au sommet (alpha en °) du triangle isocèle ABC est connue, puisque c’est l’angle du faisceau fourni par le constructeur (16, 20, 28 ou 60°).
==> La valeur de la hauteur du triangle isocèle issue de ce sommet, où le côté confondu des deux triangles rectangles, soit la valeur p en rouge sur la figure 6, est également connue puisque c’est la profondeur d’eau sous le bateau en mètre (m).
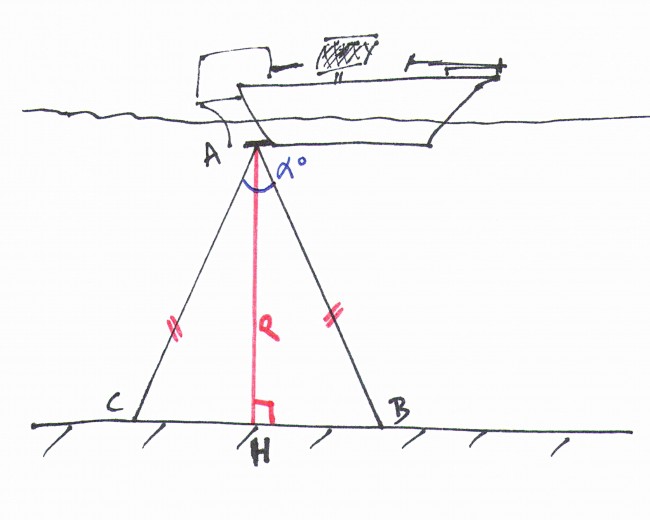
Figure 6: Schéma théorique du cône de détection de la sonde qui, écrasé en 2D, nous donne un triangle à deux côtés égaux (isocèle). La valeur Alpha de l’angle au sommet A de ce triangle isocèle ABC est connue, puisque c’est l’angle de détection donné par le constructeur (20°, 60°….). La hauteur (AH) issue du sommet A partage le triangle isocèle en 2 triangles rectangles AHB et AHC rectangle en H. La longueur p de cette hauteur AH n’est autre que la profondeur de l’eau. A partir de cette estimation de fonctionnement, je peux maintenant appliquer les règles mathématiques trigonométriques pour calculer les diamètres du cône de détection (en mètre) en fonction de l’angle de la sonde (Alpha, en °, à convertir en radian) et de la profondeur (p, en mètre).
Dans un triangle rectangle, les lois mathématiques de trigonométrie, si si vous l’avez fait vous aussi au collège, peut être en vous disant, « mais bord** de mer** à quoi ça sert d’apprendre ça ! » et bien le jour est enfin venu X année(s) plus tard d’avoir au moins une réponse : ça peut servir à calculer le diamètre du champs de détection en mètre de mon sondeur en connaissant sa fréquence de sonde et la profondeur de l’eau ! :-P….
Donc reprenons: les lois mathématiques de trigonométrie dans un triangle rectangle stipulent entre autre que :
Tangente (angle en radian) = côté opposé / côté adjacent
Autrement dit dans notre cas :
Tan (Alpha/2) = HB / p
ou encore
Tan (angle du faisceau / 2 en rad) = le rayon du champs de détection (m) / la profondeur (m)
Comme nous connaissons Tan (angle du faisceau / 2) en radian et la profondeur (en mètre), une simple petite transformation nous donne :
HB = p*Tan(Alpha/2)
ou encore
Rayon du champs de détection = profondeur d’eau multiplié par Tangente d’1/2 de l’angle du cône de détection
(pour obtenir le diamètre du champs de détection, multiplier simplement le rayon par deux).
Il suffit donc simplement d’appliquer cette dernière formule _ HB = p*Tan(Alpha/2) _ pour obtenir une approximation acceptable de son diamètre de champs de détection en fonction des fréquences de cône et des profondeurs d’eau. Vous pourrez ainsi dresser le tableau suivant :

Figure 7: Tableau des valeurs en mètre des diamètre du cône de détection en fonction de l’angle du faisceau de la sonde (en ligne) et de la profondeur d’eau (en colonne).
Que retenir de ce tableau de la Figure 7 :
1/ Dans de faibles profondeurs, nous remarquons bien la largeur réduite du faisceau pour une sonde 16/28° : Par exemple dans 4 mètres d’eau, si les pêcheurs décollent leur montage d’1 mètre du fond et qu’ils pêchent dans 3 mètres d’eau, la largeur du faisceau est au maximum de 1m50 de diamètre, soit 0.75m de rayon. Autant dire que le pêcheur assis à gauche du bateau (si la sonde est installée à droite) n’a aucune chance de se voir sur l’écran. (Voir figure 8).
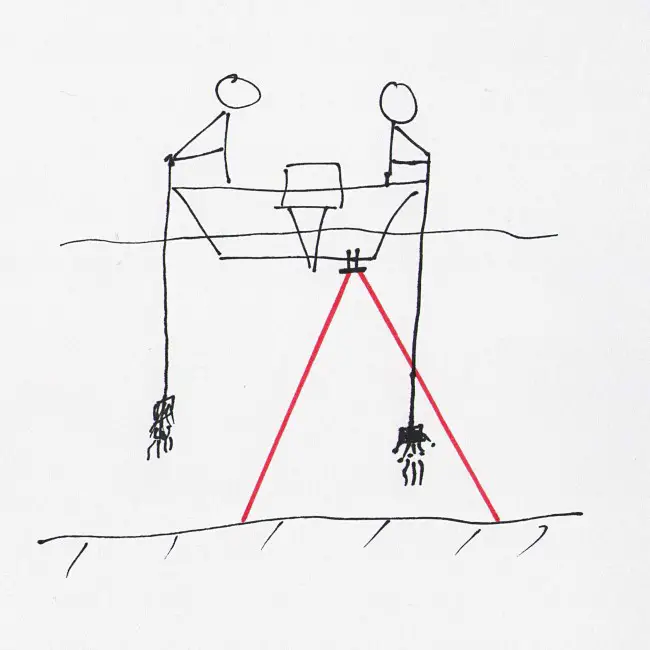
Figure 8: Schéma de 2 pêcheurs en action de pêche avec un cône de 28°, un fond de 4 mètres et des montages péchant 1 mètre au dessus du fond. Le rayon de détection du cône au niveau des montages dans une telle situation est de 75 cm. Le pêcheur de gauche ne verra pas son montage à l’écran. De plus, la moindre contrainte mécanique induisant un décalage du montage du pêcheur de droite (vent, courant…) risque d’entrainer rapidement son montage hors du cône de détection.
Pour le pêcheur de droite, une simple déviation du montage de la verticale liée au vent, au courant, au moteur électrique, fera sortir le montage de la sonde (et cela arrive vite). Un siège de bateau placé 1 mètre devant la sonde par exemple ne lui permettra pas non plus de voir son montage dans de telles conditions….
Pour une sonde de 20/60°, dans une même situation, le rayon sera d’1m73 (3,46m de diamètre). Le pêcheur de gauche pourra se trouver sur l’écran de l’échosondeur si il n’est pas éloigné de plus d’1m70 de la sonde. Le retour écho sera petit et de couleur froide, mais présent.
En définitive, nous voyons bien que la différence dans le champs de prospection est significative entre les deux types de sondes 16/28° versus 20/60°, et ce à toutes les profondeurs.
2/ Plus il y a de profondeur, et plus le cône de prospection est large.
3/ Il est possible de retenir les approximations suivantes. Jusqu’à 6 mètres de profondeur, avec le faisceau 20°, la largeur de prospection correspond à 1/3 de la profondeur d’eau. Avec le faisceau 60°, la largeur de prospection est égale à la profondeur d’eau.
4/ Dans nos eaux douces françaises pour traquer le silure à vue, c’est donc bien une fréquence double de 20/60° qu’il faut retenir.
5/ NON le 16/28° ne sert pas « A RIEN ». Dès lors que l’on recherche de la précision spatiale et de la définition sur du repérage, de l’évolution de substrats, ou de la résolution en sondant des structures (pêche de la carpe, pêche au posé, pêche de précision …. D’où l’importance du cahier des charges initial), alors cette plage de fréquence sera plus performante que la 20/60°.
PARTIE II : GPS voir cartographie + bathymétrie
Si vous avez lu sans craquer la partie I (Bravo! et rassurez vous, maintenant, c’est fingers in the nose), vous avez donc compris j’espère pourquoi choisir une sonde 20/60°. (sinon vous pouvez toujours me croire sur parole, mais il n’est pas dit que les sondes n’évoluent pas ces prochaines années…. l’apparition progressive des sondes Beam en atteste… donc comprendre le fonctionnement vous servira toujours plus que d’appliquer une recette qui sera obsolète…)
Le budget disponible ayant souvent le dernier mot, vous voila avec un budget supérieur à la simple version 2D mais inférieur à la version all inclusive Side Imaging. Vous auriez bien tapé dans la gamme Down Imaging mais comme la fonction bi fréquence de ces modèles est de 16/28°, cela ne vous semble plus très opportun (et c’est tant mieux, car bien de mes camarades l’ont regretté…). Pas de panique, il y a des fonctions dont je ne pourrais plus me passer, d’une très grande utilité quasi permanente en action de pêche, que vous pouvez ajouter à votre fonction 2D. C’est tout d’abord le GPS, puis, si encore un peu de budget disponible, une carte sylmaps ou un logiciel Autochart qui permettra de réaliser ses propres fond de cartes bathymétriques.
II A] Le GPS vous permettra en plus de connaître votre vitesse de navigation ou de dérive en action de pêche, d’enregistrer des points (waypoints) aux endroits clés de votre pêche (cassure, gros échos, poissons touchés….). Ce GPS, capable également de mémoriser vos traces de navigations peut s’avérer très utile pour rentrer à la nuit tombée ou en plein brouillard. A mes yeux, il est la première fonction a rajouter à son sondeur 2D bifréquence 20/60°.

Figure 9: Photographie d’un appareil 1199 en fonction GPS plein écran. Les waypoints labellisés désignent des structures et éléments clés de mes sorties précédentes permettant d’améliorer mes approches de sortie en sortie.
II B] La Bathymétrie : accessible via (i) les cartes Sylmaps si vous pêchez un secteur déjà cartographié par NAVICOM ou via les logiciels Autocharts (pro). Autochart est un logiciel couplé à une carte SD qui vous permet de réaliser vos propres cartographies bathymétriques sur vos parcours de pêche. Une carte des fonds extrêmement précieuses pour redoubler de précision dans sa pêche. Vous pouvez bien entendu y superposer vos waypoints. Cette option peut sans problème être rajoutée plus tard, après l’achat de votre échosondeur. Ce qui n’est pas le cas de l’option GPS. Celle-ci est à prévoir d’emblée, ou alors envisager une revente puis un nouvel achat.
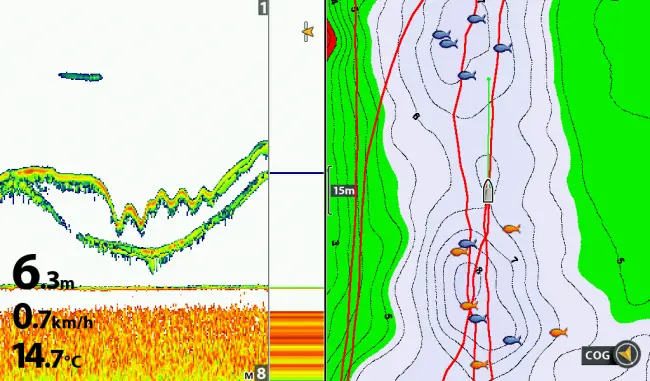
Figure 10: Capture d’écran (Helix 10) d’une action de pêche en vue partagée avec à gauche, ma fenêtre 2D bi fréquence 20/60°, et à droite, ma carte bathymétrique + GPS m’indiquant les variations de profondeur, mes trajectoires (en rouge), mais également en waypoint de forme poisson bleu, la position des silures déjà vu à l’écho mais jamais pris, et en rouge la position de mes précédentes touches ayant induit des silures capturés.
Partie III : une question de taille
Question qui peut paraître anodine, mais qui pourtant joue un grand rôle sur le confort d’utilisation et sur le budget d’un appareil : c’est la taille de l’écran.
L’écran 5 pouces (Helix 5) est idéal pour les petits budgets, et les situations de pêche où l’on reste proche de l’écran (float tube, barque, petit zodiac). Il est également idéal pour une pêche en plein écran 2D. En revanche, cette petite taille devient une limite sérieuse sur de plus grands bateaux de pêche ou pour une utilisation en écran partagé (par exemple, une vue pêche 2D couplée à une vue carte bathymétrique comme sur la figure 10).
L’écran 7 pouces est un passe partout polyvalent. Il reste un peu lourd en float tube mais convient pour tous les autres types d’embarcation. Sa limite survient lors de l’utilisation en vue triple (Cf Figure 11).
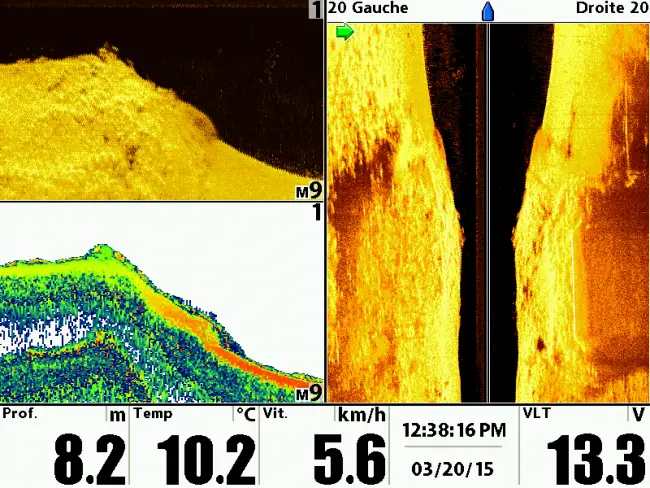
Figure 11: Capture d’écran d’un FF1199 en vue triple. Pour tirer pleinement profit d’une telle organisation d’écran, une taille 9 pouces me paraît être le minimum.
L’écran 9 pouces reste pour moi la taille recommandée lorsque l’on souhaite équipé un bateau de pêche (4m10 et +). Il permet d’exploiter à 100% toutes les fonctions et de les cumulées à volonté avec confort. En revanche, sa taille et son poids peuvent le rendre inconfortable sur des petites barques, kayaks et surtout float tubes.
Au dessus, (10 pouces et 12), cela devient le grand luxe pour vos bateaux, avec des tailles d’écran permettant une excellente lecture même à plusieurs mètres.

Figure 12: Un écran d’échosondeur de taille 10 pouces (Helix 10), sur mon bateau de 4m10 de long.
Remarque: Ecran tactile ou traditionnel ? C’est un choix qui reste assez personnel. Pour ma part, à la pêche du silure, avec les doigts tantôt couvert de terre, de jus de vers de terre, de mucus de vifs ou de silure, ou de powerbaits, je préfère ne pas avoir à tartouiller mon écran. J’ai déjà bien assez à faire pour le garder propre malgré les projections d’eau du clonk 😀
Partie IV : les versions SI, Side Imaging: le très haut de gamme.
Dans les versions Side Imaging, vous disposerez d’une fonction 2D de 20/60°, du GPS, mais également des fonctions Down Imaging et Side Imaging.
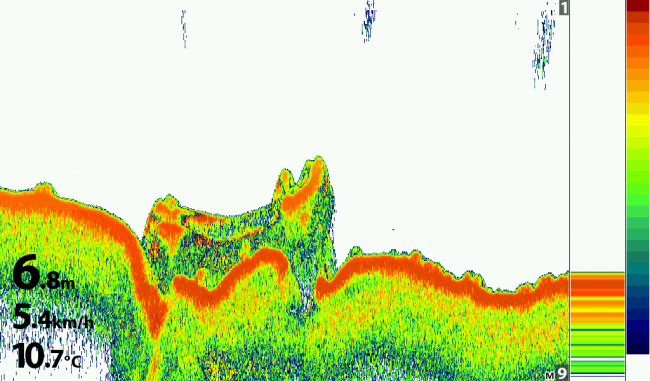
Figure 13: Capture d’écran 2D Helix 10. Mais quel est ce truc bizarre vert et rouge?
IV A] La fonction Side Imaging permet de sonder à faible vitesse de navigation jusqu’à 120 mètres de chaque côté de votre embarcation. Avec un angle de 172°, cette fonction peut se faire avec une fréquence de 455 kHZ pour une largeur de prospection maximale mais moyennement détaillée, ou avec une fréquence de 800 kHz, permettant une prospection un peu moins large mais avec une résolution bien meilleure. En rivière ou fleuve avec des prospections de 20 à 50 mètres de chaque côté, j’utilise sans hésiter le 800 kHz, qui peut permettre en navigation lente de se faire rapidement une idée de la topologie et la nature des lieux avec précision, ou encre de repérer la position de bancs de poissons ou de silures décollés.
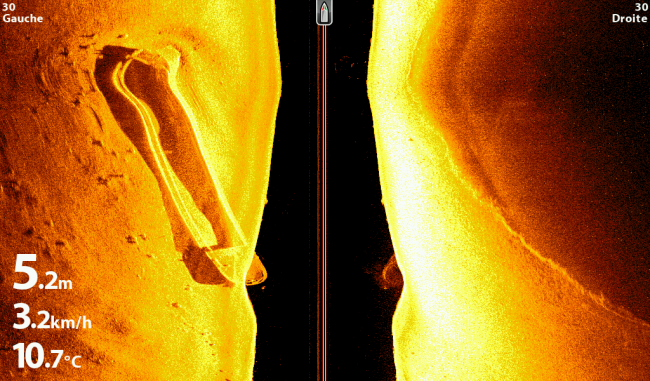
Figure 14: Capture d’écran Side Imaging Helix 10. Le truc bizarre vert rouge de la figure 13, sondé en Side Imaging 800kHz, révèle alors clairement la présence d’une péniche coulée.
IV B] La fonction Down Imaging est une cousine de la fonction Side Imaging mais l’angle du faisceau est plus petit et orienté vers le fond. Il permet une vue de type échographie médical de ce qui se passe sous le bateau. Utilisé en complément de la fonction 2D, elle permet souvent de tirer au clair l’identité d’un écho apparaissant ambiguë (est ce un silure ou une encombre ?). Cette fonction permet également de diriger avec grande précision ses montages au milieu des structures en limitant les risques d’accrocs. Très utile, mais loin de représenter la majorité du temps de pêche. Je conseille donc ces versions et ces fonctions aux pêcheurs aguerris, déjà familiers avec les technologies précédentes 2D et GPS.
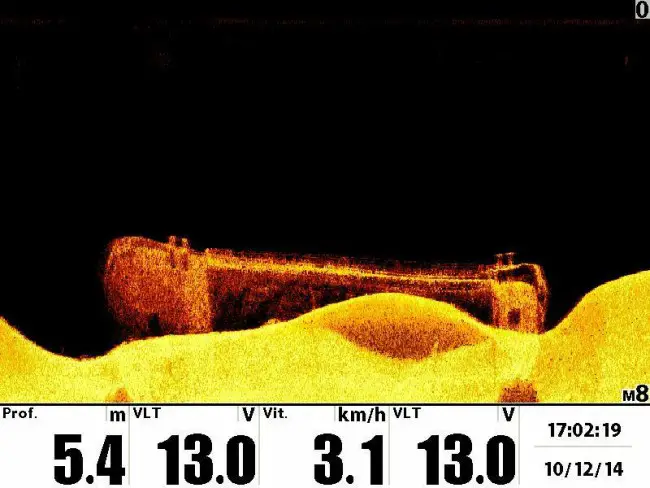
Figure 15: Capture d’écran Down Imaging FF1198. Le truc bizarre vert rouge de la figure 13, sondé en Down Imaging 800kHz, révèle alors en détail la barge noyée.
En conclusion, ce qu’il faut retenir de cet article :
Pour choisir mon échosondeur pour pêcher le silure à vue :
- je prends le temps d’établir un cahier des charges précis
- 1, je choisis une fonction 2D double fréquence 20/60°
- 2, j’opte pour une taille d’écran adaptée et judicieusement choisie
- suivant mon budget, et après avoir déterminé les points 1 et 2, je peux rajouter dans cet ordre : la fonction GPS, la cartographie, les fonctions Side et Down Imaging
(Et oui, vous vous êtes tapé tout ce blabla pour finalement n’avoir à retenir que 4 tout petits points! J’espère que vous aurez au moins appris un nouveau petit truc avec cette lecture 😉 ). Et si après avoir lu cet article vous avez des questions à ce sujet, n’hésitez pas via ce site ou les réseaux sociaux.

Au plaisir
Lilian F.
Les commentaires sont fermés.